Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124

Современные беспилотники от таких компаний, как DJI и Parrot, уже давно имеют собственные инструменты для избежания столкновений с элементами ландшафта, но когда дроны сталкиваются с обилием препятствий и крайне ограниченным пространством, например, в лесу, автономная навигация затруднена и стандартные алгоритмы уже не справляются. Вот почему ученые из Intel Labs и мексиканского Центра перспективных исследований при Национальном политехническом институте попытались решить данную проблему при помощи машинного обучения и набора 3D-датчиков.
Исследователи при помощи машинного обучения, 3D-датчиков и модуля одометрии научили дроны ориентироваться в условиях с ограниченным пространством
Исследователи поделились результатами проделанной работы в статье «Автономная навигация беспилотных летательных аппаратов в неизвестных загроможденных средах», опубликованной на сервере препринтов Arxiv.org, где утверждается, что в проведённом ими тестировании новый алгоритм навигации, проверенный на дронах Intel Ready to Fly, продемонстрировал отличную производительность.
«Автономная навигация в неизвестном окружении с ограниченным пространством является одной из фундаментальных проблем в робототехнике, особенно в задачах по поиску и спасанию, сбору информации и проверки промышленных и гражданских сооружений», — написали соавторы. «Хотя картографирование, планирование и генерацию траекторий можно считать давно изученными задачами, которые можно решить с учётом определенных комбинаций роботизированных платформ и окружений, системы, объединяющие все эти инструменты для навигации дронов, всё еще отсутствуют».
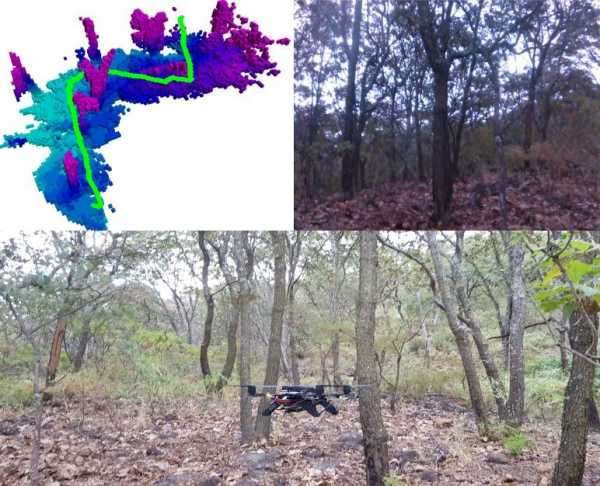
Новая система навигации использует набор 3D-датчиков и модуль одометрии и состоит из трёх компонентов: 1 — алгоритм, который создаёт карту пространства при помощи датчиков глубины, 2 — модель, которая генерирует траектории безопасные для навигации, учитывая ограничения поля обзора, и 3 — модель, которая планирует непосредственное передвижение беспилотника по безопасному маршруту. На этапе картирования алгоритм формирует облако точек, а затем добавляет его к отображению на карте занятого пространства беспилотника. Данные об окружении собираются в режиме реального времени и на их основе непрерывно просчитываются варианты возможных траекторий, чтобы выбрать наиболее короткую и надёжную из них, при этом система пытается обеспечить постоянную ориентацию дрона в пространстве таким образом, чтобы датчики получали максимум информации.
Чтобы проверить работу своего решения, исследователи провели эксперименты как в реальных условиях, так и в виртуальной среде, используя фреймворк Robotic Operating System Kinetic. Они сообщают, что в одном из тестов время, необходимое дрону для начала движения в заданных условиях, составило 3,37 миллисекунды по сравнению со стандартными алгоритмами, где ему потребовалось 103,2 миллисекунды в одном варианте и 35,5 миллисекунды в другом, а на составление карты пространства и расчёт траектории движения потребовалось 0,256 миллисекунды против 700,7 и 2,035 миллисекунды.
Конечно, пока ещё новая система не идеальна. Команда отмечает, что их алгоритм имел тенденцию в тестах генерировать несколько более длинные маршруты, чем оптимальные, которые можно было бы использовать при ручном управлении, и что он не смог достичь целевой точки назначения в симуляции лабиринта с очень тесными пространствами. Тем не менее, учёные считают, что их работа в будущем может привести к появлению решений, которые объединят инструменты по расчёту траектории при помощи сканирования пространства и модели для динамического предсказания препятствий, что поможет дронам значительно более эффективно ориентироваться в сложных условиях.
На видео ниже вы можете наглядно посмотреть на тестирование системы.
Источник: